A Talent-infused Policy-gradient Approach to Efficient Co-Design of Morphology and Task Allocation Behavior of Multi-Robot Systems
Description
Prajit KrisshnaKumar, Steve Paul and Souma Chowdhury
Distributed Autonomous Robotic Systems (DARS), 2024
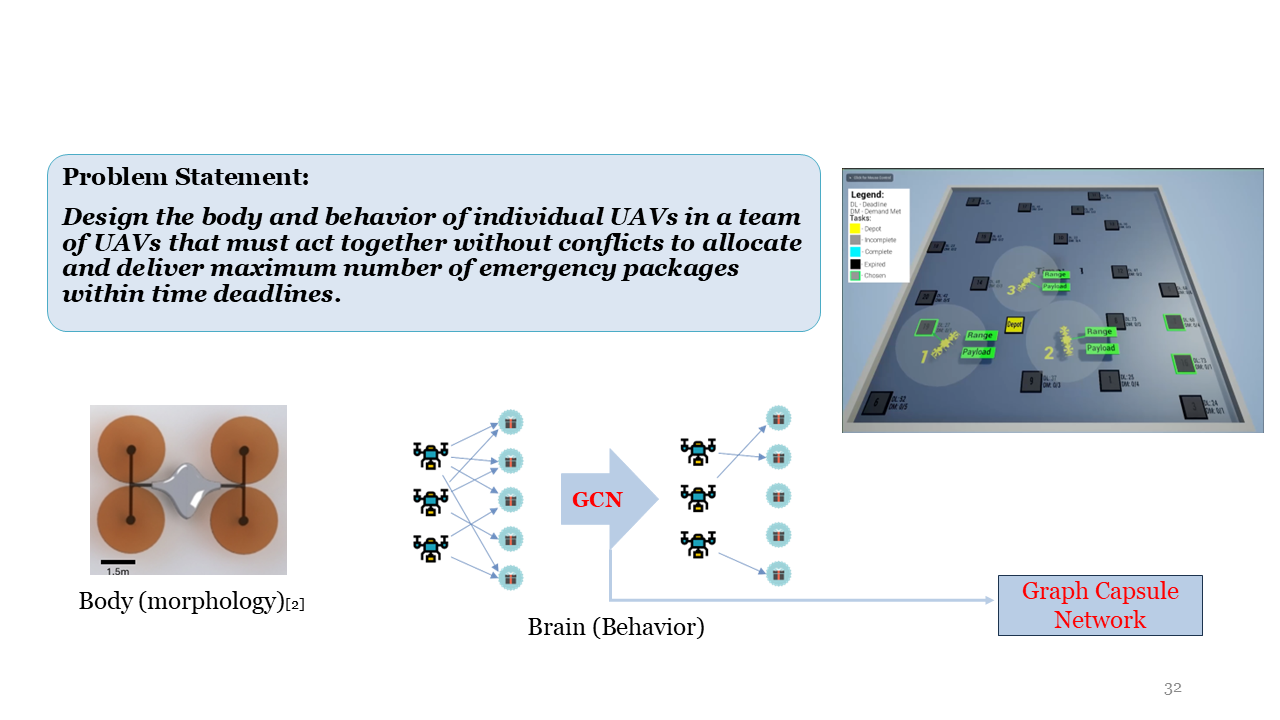
Interesting and efficient collective behavior observed in multi-robot or swarm systems emerges from the individual behavior of the robots. The functional space of individual robot behaviors is in turn shaped or constrained by the robot's morphology or physical design. Thus the full potential of multi-robot systems can be realized by concurrently optimizing the morphology and behavior of individual robots, informed by the environment's feedback about their collective performance, as opposed to treating morphology and behavior choices disparately or in sequence (the classical approach). This paper presents an efficient concurrent design or co-design method to explore this potential and understand how morphology choices impact collective behavior, particularly in an MRTA problem focused on a flood response scenario, where the individual behavior is designed via graph reinforcement learning. Computational efficiency in this case is attributed to a new way of near exact decomposition of the co-design problem into a series of simpler optimization and learning problems. This is achieved through i) the identification and use of the Pareto front of Talent metrics that represent morphology-dependent robot capabilities, and ii) learning the selection of Talent best trade-offs and individual robot policy that jointly maximizes the MRTA performance. Applied to a multi-unmanned aerial vehicle flood response use case, the co-design outcomes are shown to readily outperform sequential design baselines. Significant differences in morphology and learned behavior are also observed when comparing co-designed single robot vs. co-designed multi-robot systems for similar operations.